
Mal



YY-C01 Makîneya hişyariya xweparastina aqilmend a li ser wesayîtê ya siyarkirî

Radara dûr û dirêj a pir rast

Axaftvanên pêla dengê dualî yên hêzdar

Pêvajoyên ARM bi performansa bilind

Tomarkirina vîdyoyê û dîtina dûr
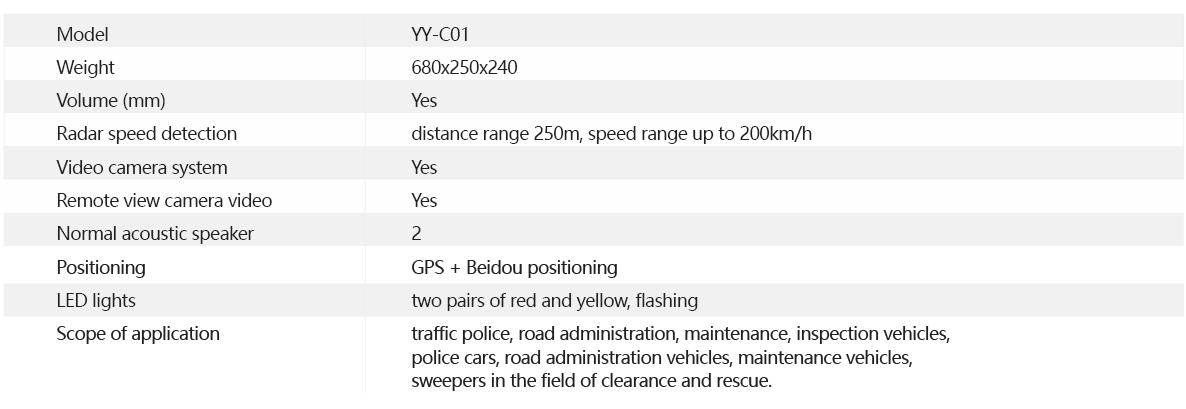
YY-C01
MAKÎNA HIŞYARÎ YA XWEBÛNÊ LI BERXWEBÛNÊ LI WEŞÎTÊ
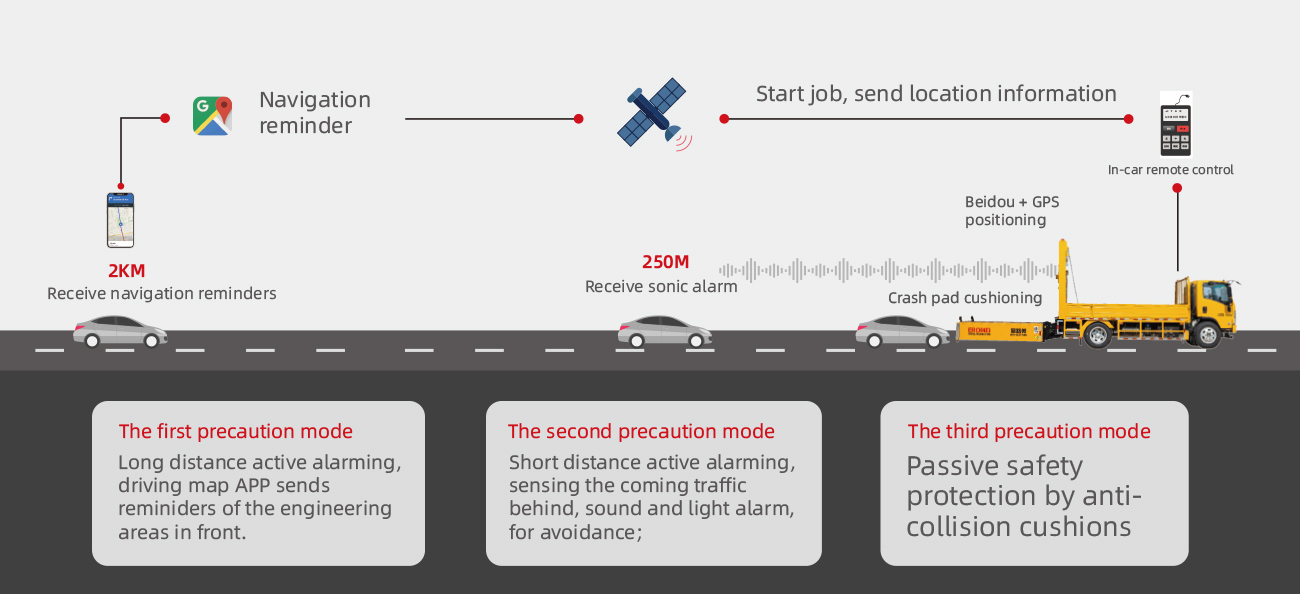
Ew dikare wesayîtên di rêza 250M de li pişt wesayîtên endezyariyê rast tespît bike û bişopîne.Awayê ku ew dixebite ev e ku dema ku wesayîtek ji wesayîtên endezyariyê dikeve nav 250M, û leza wê ji 60 Km / h zêdetir e (di pergalê de dikare were danîn), an ajotina li ser xetên nîşankirinê an bi şiklê S-yê dihejîne, an ajotina gengaz a din. awayên ku ewlehiya mirovên endezyar tehdîd dikin, axaftvan dê dengê hişyariyê li wesayîtên ajotinê bike, ewlehiyê bîne bîra ajoker û rê biguhezîne.
Ger wesayît rê neguhêre û ji wesayîtên endezyariyê bikeve rêza 50 m, û leza ji 40 Km / h zêdetir be (di pergalê de were danîn), axaftvan dê dengek bihêztir hişyar bike, di heman demê de pergala alarmê ya deverên endezyariyê çalak bike, aktîvkirina cîhazên hişyarkirina koletiyê (alava hişyariya şûştina magnetîkî û amûra hişyariya zengila destikê) da ku karmendên kardar hişyar bike da ku ji bûyeran dûr nekevin.

DESCRIPTION PRODUCT

• Pozîsyona bilind û teknolojiya IoT
Bi algorîtmaya pozîsyona nexşeyên pêbawer ên bilind ve girêdayî ye, agahdariya hişyariya zû bi pergala navîgasyonê ve girêdayî ye ku piştgirî bide rêveberiya karsaziya dûr a IOT.
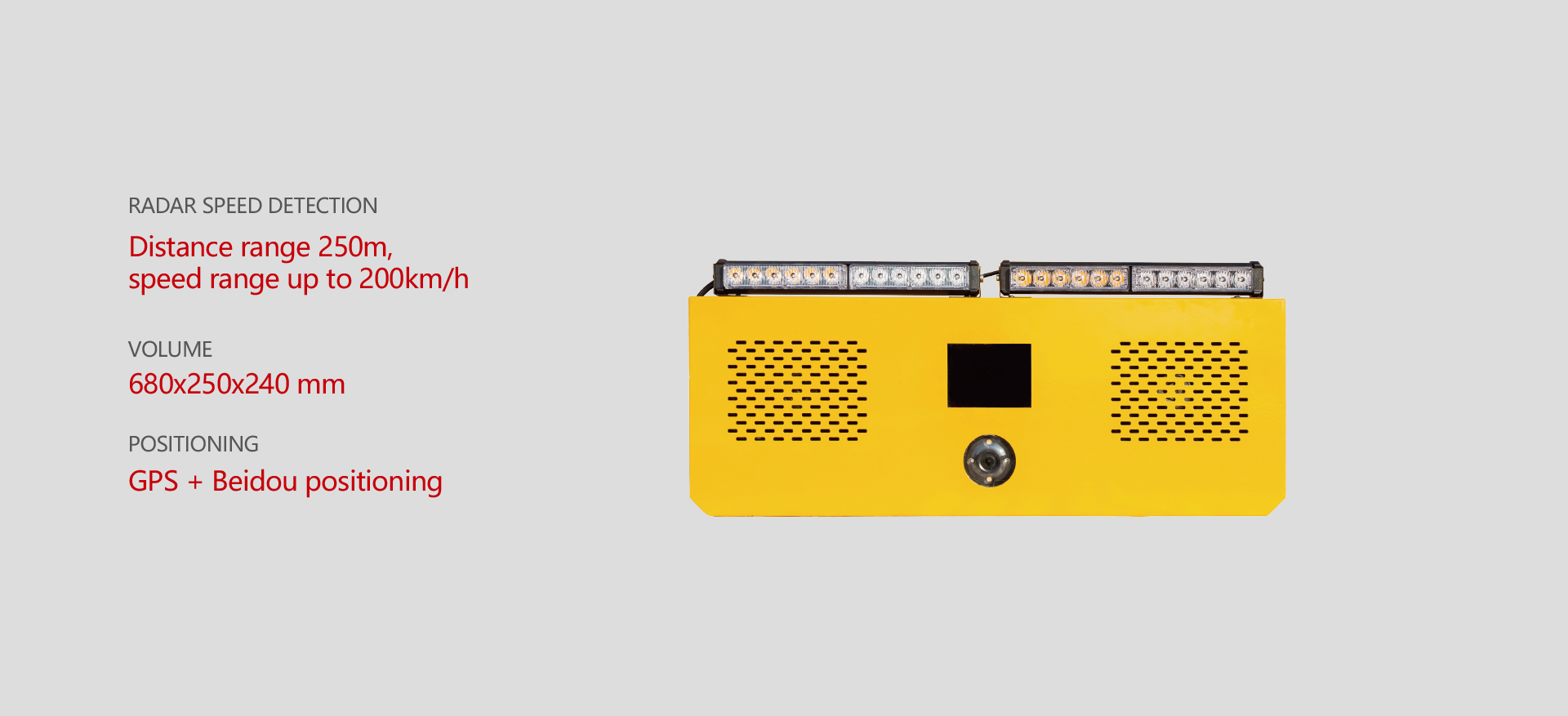
• Radara dûr û dirêj a pir rast
Senteza tîrêjê dîjîtal DBF, apertura sentetîk a virtual û vedîtina moda dualî ya ji bo dûr û nêzikbûnê têne bikar anîn da ku bigihîje dûrahiya pîvandina 250 m, mezinahiya tevlihev, hesasiyeta bilind û performansa domdar.
• Pêvajoyên ARM performansa bilind
Bi algorîtmaya pozîsyona nexşeyên pêbawer ên bilind ve girêdayî ye, agahdariya hişyariya zû bi pergala navîgasyonê ve girêdayî ye ku piştgirî bide rêveberiya karsaziya dûr a IOT.
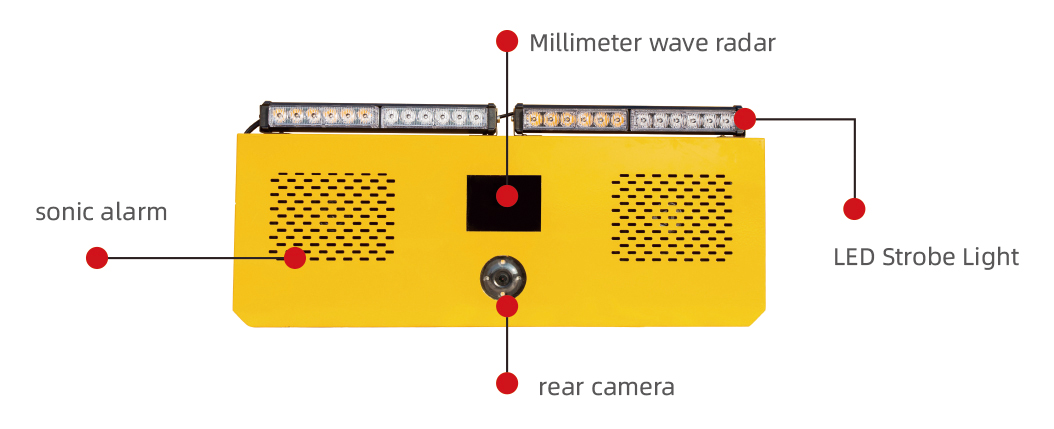
• Axaftvanên pêla deng dual bi hêz
Pêlên dengê bilind ên decibel, veguheztina dûr û dirêj, bi bandor ewlehiya ajotinê tîne bîra xwedan.
• Tomarkirina vîdyoyê û dîtina ji dûr ve
Dîtina rast-demê ya dîmenên vîdyoyê yên zindî, çavdêriya hawîrdora xebitandinê ya li ser malperê bi tomarkirina vîdyoyê, û peydakirina şopandina piştî acîl.

SERLÊDANA PIR ARMANCA











- English
- French
- German
- Portuguese
- Spanish
- Russian
- Japanese
- Korean
- Arabic
- Irish
- Greek
- Turkish
- Italian
- Danish
- Romanian
- Indonesian
- Czech
- Afrikaans
- Swedish
- Polish
- Basque
- Catalan
- Esperanto
- Hindi
- Lao
- Albanian
- Amharic
- Armenian
- Azerbaijani
- Belarusian
- Bengali
- Bosnian
- Bulgarian
- Cebuano
- Chichewa
- Corsican
- Croatian
- Dutch
- Estonian
- Filipino
- Finnish
- Frisian
- Galician
- Georgian
- Gujarati
- Haitian
- Hausa
- Hawaiian
- Hebrew
- Hmong
- Hungarian
- Icelandic
- Igbo
- Javanese
- Kannada
- Kazakh
- Khmer
- Kurdish
- Kyrgyz
- Latin
- Latvian
- Lithuanian
- Luxembou..
- Macedonian
- Malagasy
- Malay
- Malayalam
- Maltese
- Maori
- Marathi
- Mongolian
- Burmese
- Nepali
- Norwegian
- Pashto
- Persian
- Punjabi
- Serbian
- Sesotho
- Sinhala
- Slovak
- Slovenian
- Somali
- Samoan
- Scots Gaelic
- Shona
- Sindhi
- Sundanese
- Swahili
- Tajik
- Tamil
- Telugu
- Thai
- Ukrainian
- Urdu
- Uzbek
- Vietnamese
- Welsh
- Xhosa
- Yiddish
- Yoruba
- Zulu
- Kinyarwanda
- Tatar
- Oriya
- Turkmen
- Uyghur